People who are visually impaired and cannot afford or care for service animals might have a practical alternative in a robotic guide dog being developed at Georgia Tech.
Before launching its prototype, a research team within Georgia Tech’s School of Interactive Computing, led by Professor Bruce Walker and Assistant Professor Sehoon Ha, is working to improve its methods and designs based on research within blind and visually impaired (BVI) communities.
“There’s been research on the technical aspects and functionality of robotic guide dogs, but not a lot of emphasis on the aesthetics or form factors,” said Avery Gong, a recent master’s graduate who worked in Walker’s lab. “We wanted to fill this gap.”
With training a guide dog costing up to $50,000, few BVI individuals can afford one, and even fewer can afford to care for and feed it. The dog also has fewer than 10 working years before it needs replacement.
Gong co-authored a paper on the design implications of the robotic guide dog that was presented at the 2025 International Conference on Robotics and Automation (ICRA) in Atlanta in May.
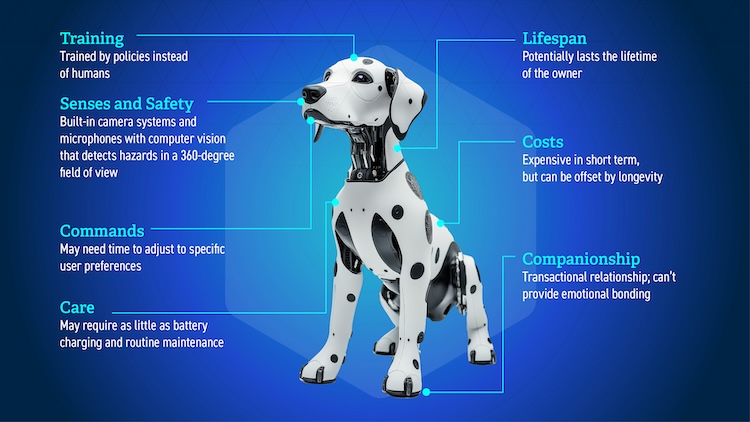
The consensus among the study’s participants indicates they prefer a robotic guide dog that:
- resembles a real dog and appears approachable
- has a clear identifier of being a guide dog, such as a vest
- has built-in GPS and Bluetooth connectivity
- has control options such as voice command
- has soft textures without feeling furry
- has long battery life and self-charging capability
“A lot of people said they didn’t want the dog to look too cute or appealing because it would draw too much attention,” said Aviv Cohav, another lead author of the paper and recent master’s graduate.
“Many people have issues with taking their guide dog to places, whether it’s little kids wanting to play with the dog or people not liking dogs or people being scared of them, and that reflects on the owners themselves. We wanted to look at what would be a good balance between having a functional robot that wouldn’t scare people away or be a distraction.”
The researchers also had to consider the perspectives of sighted individuals and how society at large might view a robotic guide dog.
An example of this is the amount of noise the dog makes while walking. The owner needs to hear the dog is active, but the clanky sound many off-the-shelf robots make could create disturbances in indoor spaces that amplify sounds. To offset the noise, the team developed algorithms that allow the robot to move more quietly.
Walker and his lab have examined similar scenarios that must take public perception into account.
“We like to think of Georgia Tech as going the extra mile,” Walker said. “Let’s not just make a robot, but a robot that’s going to fit into society.
“To have impact, the technologies we produce must be produced with society in mind. This is a holistic design that considers the users and all the people with whom the users interact.”
Taery Kim, a computer science Ph.D. student, began working on the concept of a robotic guide dog when she came to Georgia Tech in 2022. She and Ha, her advisor, have authored papers on building the robot’s navigation and safety components.
“When I started, I thought it would be as simple as giving the guide dog a command to take me to Starbucks or the grocery store, and it would just take me,” Kim said. “But the user must give waypoint directions — ‘go left here,’ ‘turn right,’ ‘go forward,’ ‘stop.’ Detailed commands must be delivered to the dog.”
While a real dog has naturally enhanced senses of hearing and smell that can’t be replicated, technology can provide interconnected safety features during an emergency. The researchers envision a camera system equipped with a 360-degree field of view, computer vision algorithms that detect obstacles or hazards, and voice recognition that recognizes calls for help. An SOS function could automatically call 911 at the owner’s request or if the owner is unresponsive.
Kim said the robot should also have explainability features to enhance communication with the owner. For example, if the robot suddenly stops or ignores an owner’s commands, it should tell the owner that it’s detecting a hazard in their path.
Manufacturing a robot at scale would initially be expensive, but the researchers believe the cost would eventually be offset because of its longevity. BVI individuals may only need to purchase one during their lifetime.
To introduce a prototype, the multidisciplinary research team recognizes that it needs to enlist experts from other fields to adequately address the various implications and research gaps inherent in the project.
Walker said the teams welcome additional partners who are keen to tackle challenges ranging from design and engineering to battery life to human-robot interaction.